

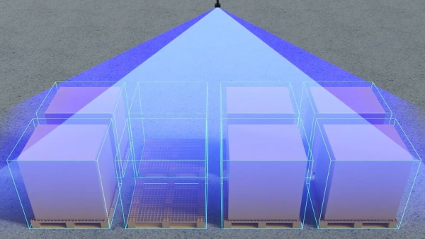
El sistema de monitorización de almacén es una solución basada en visión 3D, diseñada para monitorizar de forma continua el estado de las ubicaciones de almacenamiento en entornos logísticos e industriales. Utiliza cámaras RGB-D instaladas en el techo que generan una representación tridimensional del espacio y permiten detectar ocupación, mercancía y dimensiones aproximadas en tiempo real.
Su función principal es proporcionar información precisa y actualizada al WMS para mejorar la planificación operativa, la gestión del espacio y la automatización logística.
Objetivos del sistema de monitorización de almacén
- Obtener información fiable y continua sobre ocupación de huecos en estanterías o zonas de almacenamiento.
- Calcular automáticamente y en tiempo real las dimensiones aproximadas de la mercancía (largo, ancho y alto).
- Detectar inconsistencias en la colocación o volumen del pallet/caja.
- Enviar datos estructurados al WMS para permitir una asignación de ubicaciones optimizada.
- Sustituir procesos manuales de verificación, escaneo, medición o inspección visual.
Arquitectura general del sistema de monitorización de almacén
Hardware
- Cámaras RGB-D cenitales instaladas en techo o pórticos.
- Conectividad mediante Ethernet (TCP, UDP o HTTP).
- Alimentación PoE (si se requiere).
- Campo de visión configurado para cubrir pasillos, estanterías o áreas concretas.
Procesamiento
- Procesado on-edge en la propia cámara o unidad integrada.
- No requiere PC industrial externo.
- Algoritmos optimizados para reconstrucción 3D y segmentación volumétrica.
Software y salida de datos
- Cálculo automático de:
- Estado de ocupación (libre/ocupado/parcial).
- Dimensiones aproximadas de objetos detectados (L x W x H).
- Volumen estimado.
- Coordenadas relativas dentro del área supervisada.
- Timestamp de captura.
- Salida de datos mediante JSON compatible con WMS, MES o sistemas propios.
Flujo de funcionamiento
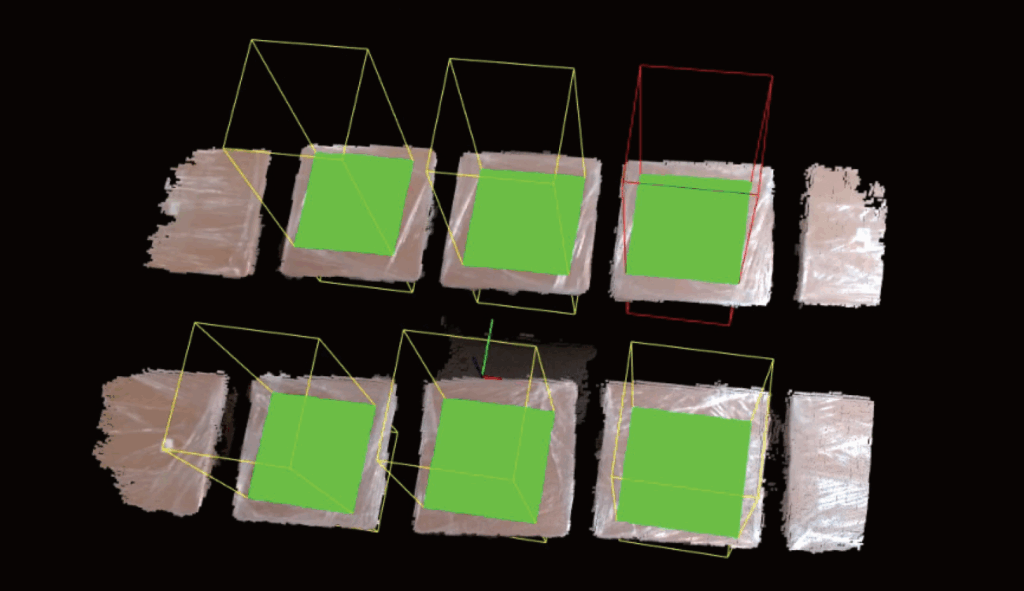
- Captura 3D: La cámara toma imágenes RGB-D y genera una nube de puntos del área supervisada.
- Reconstrucción volumétrica: El algoritmo fusiona punto 3D + textura y elimina ruido, reflejos o huecos intermitentes.
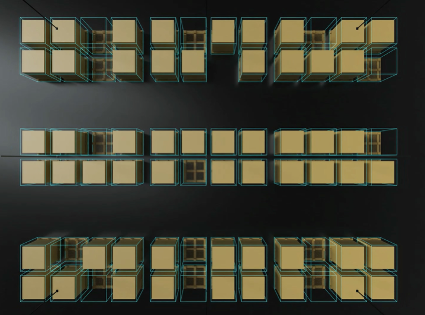
- Detección de ocupación: Se evalúa la presencia o ausencia de objetos en cada ubicación preconfigurada.
- Medición dimensional en tiempo real: Se calcula para cada mercancía visible:
- Largo (X)
- Ancho (Y)
- Altura (Z)
- Los valores se obtienen mediante bounding boxes ajustadas a la nube de puntos.
- Análisis de anomalías:
- Pallets mal colocados.
- Ocupaciones parciales.
- Sobresalidos fuera del espacio permitido.
- Dimensiones no coincidentes con lo previsto.
- Comunicación con el WMS:
- El sistema envía los datos actualizados (cada 0,5–2 s según configuración).
- La información se integra en la planificación de ubicaciones, reposición o rutas de AGVs/AMRs.

Especificaciones técnicas principales
Datos de medición:
- Precisión dimensional: depende del montaje (típicamente ±2–5 cm).
- Frecuencia de actualización: configurable (hasta varios Hz).
- Cobertura: según óptica, altura de montaje y geometría del almacén.
Requisitos de instalación:
- Altura recomendada del techo: 6–14 metros (variable según modelo).
- Iluminación: no crítica gracias al uso de sensores de profundidad.
- Ángulo de visión: cenital o ligeramente inclinado para evitar oclusiones.
Integración: Protocolos soportados:
- TCP
- UDP
- HTTP/REST
- Formatos: JSON estructurado.
- Configurable por API o interfaz local.
Seguridad y robustez:
- Detección estable incluso con:
- Mercancía irregular
- Cambios de iluminación
- Variaciones de color o textura
- Sin interferencias con maquinaria o personal.
- No requiere calibraciones frecuentes.
Casos de uso típicos
- Control de ocupación para estanterías de pallets.
- Monitorización de zonas de picking y buffer.
- Verificación volumétrica de mercancía entrante.
- Planificación de huecos basada en volumen real.
- Control de sobresalidos y prevención de riesgos.
- Integración con sistemas robotizados para asignación dinámica.