

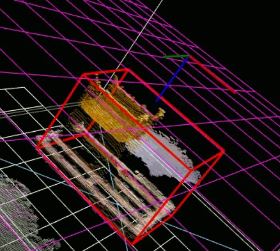
La medición volumétrica 3D basada en cámaras ToF (Time-of-Flight) es un sistema capaz de calcular el volumen exacto, las dimensiones completas (largo, ancho y alto) y la geometría superficial de cualquier objeto dentro del campo de visión. El sistema captura datos de profundidad de manera directa mediante un sensor ToF y reconstruye una nube de puntos densa, a partir de la cual se obtiene un modelo 3D preciso.
La solución permite trabajar:
- Con una sola cámara ToF para objetos pequeños (desde 5 x 5 x 5 cm).
- Con dos cámaras para eliminar oclusiones y medir objetos medianos (mínimo 30 x 30 x 30 cm).
- Con conjuntos multicámara para grandes cargas, pallets o múltiples objetos simultáneos.
El funcionamiento es totalmente automático y sin contacto, ideal para logística, producción, cubicaje, inspección y clasificación.
Objetivos del sistema de medición de volumen 3D
El sistema de volumen 3D está diseñado para:
- Capturar automáticamente la forma y las dimensiones reales de uno o varios objetos en la escena.
- Calcular con precisión el volumen total mediante reconstrucción 3D.
- Operar en tiempo real, con procesado instantáneo a nivel de borde (on-edge).
- Soportar multi-objeto, detectando y midiendo varios elementos dentro del mismo campo de visión.
- Garantizar precisión milimétrica, incluso en condiciones de iluminación variables.
- Permitir integración directa vía API con ERP, WMS, TMS o software del cliente.
- Escalar fácilmente en función del tamaño del objeto mediante 1, 2 o múltiples cámaras ToF.
Arquitectura general del sistema de volumen 3D
La arquitectura del sistema se basa en tres elementos principales:
- Sensores ToF para la captura de profundidad real
- Procesamiento a bordo para generar el modelo 3D
- Algoritmos volumétricos avanzados para calcular dimensiones y volumen
A continuación, se detallan los componentes.
Cámara ToF (Time-of-Flight)
La cámara ToF es el sensor principal del sistema:
- Emite pulsos de luz infrarroja y mide el tiempo de retorno (time-of-flight).
- Genera un mapa de profundidad por píxel con precisión milimétrica.
- Produce una nube de puntos 3D completa en cada frame.
- Permite medir objetos con distintas formas, materiales o texturas.
Configuraciones soportadas:
- 1 cámara → objetos pequeños (≥ 5 x 5 x 5 cm)
- 2 cámaras sincronizadas → objetos medianos (≥ 30 x 30 x 30 cm)
- Conjunto multicámara → pallets, cargas irregulares y volumetrías complejas
Cámara RGB (opcional)
Algunas configuraciones incluyen cámara RGB integrada:
- Proporciona textura y color para identificación.
- Mejora algoritmos de segmentación y multi-objeto.
- No afecta al volumen pero enriquece el modelo final.
(Se mantiene paralelismo con 1.3.1 del RTLS, versión adaptada)
Núcleo de reconstrucción volumétrica
El motor central del sistema ejecuta:
- Filtrado y limpieza de la nube de puntos
- Eliminación de ruido
- Corrección de sombras y oclusiones parciales
- Reconstrucción tridimensional del objeto
- Generación de malla o nube procesada
- Detección del contorno real del bulto
- Segmentación multi-objeto
- Identificación independiente de cada elemento en escena
- Etiquetado y asignación de límites
- Cálculo dimensional (L x W x H)
- Bounding box 3D alineada o ajustada
- Determinación de orientación del objeto
- Cálculo de volumen
- Volumen real en cm³, dm³ o m³
- Soporte para objetos irregulares
- Exportación y API
- JSON estructurado
- Integración con WMS/ERP/TMS
- Envío en tiempo real
Especificaciones del sistema de medición de volumen 3D
- Tecnología de profundidad: ToF (Time-of-Flight)
- Precisión típica: ±1–5 mm según distancia de cámara
- Frecuencia: 20–60 fps según modelo
- Volumen mínimo medible:
- 1 cámara: ≥ 5 x 5 x 5 cm
- 2 cámaras: ≥ 30 x 30 x 30 cm
- Multicámara: sin límite práctico
- Objetos múltiples: detección y medición independiente por cada objeto
- Procesamiento: completamente on-edge
- Salida: JSON, TCP, UDP, API REST
- Entorno: iluminación variable, no requiere luz especial
- Robustez: tolerante a polvo, vibración y sombras
Casos de uso típicos
- Medición automática en recepción de mercancía
- Cálculo volumétrico para tarifas de transporte (cubicaje)
- Control dimensional en líneas de producción
- Medición de cargas irregulares, deformadas o heterogéneas
- Integración con sistemas de clasificación automática
- Auditoría volumétrica continua en e-commerce y paquetería
- Optimización de carga en pallets, ULD o contenedores
- Detección y medición simultánea de múltiples objetos