

El RTLS de la V2 Pro es un sistema de localización en tiempo real diseñado específicamente para AGVs, AMRs y carretillas elevadoras. Combina simultáneamente:
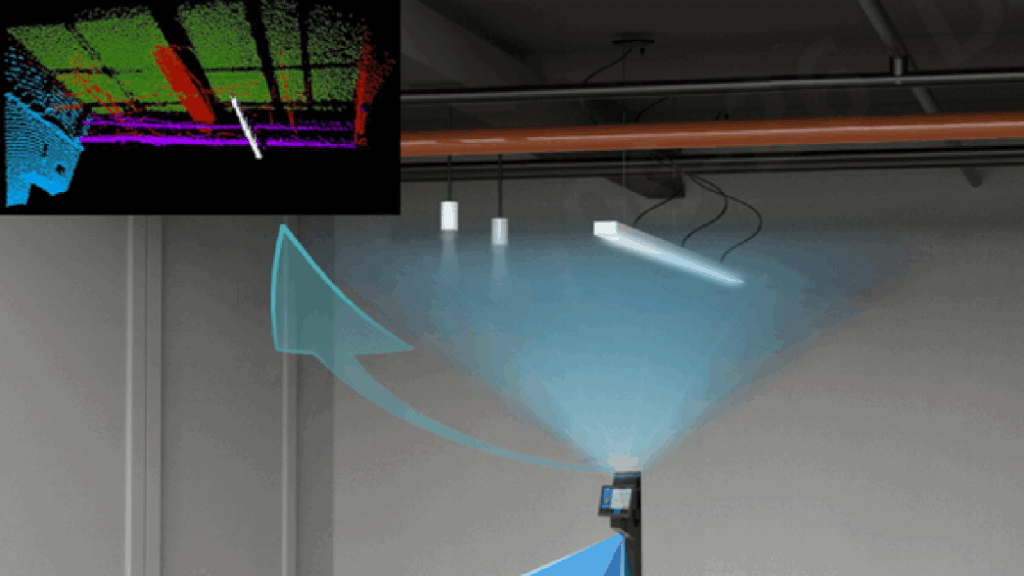
- Imágenes cenitales RGB del entorno (techo principalmente).
- Nube de puntos 2D LiDAR.
- IMU integrada.
- SLAM integrado en el propio dispositivo.
Gracias a esta fusión multisensor, la cámara es capaz de reconstruir un modelo estable del techo, identificar patrones geométricos y texturas superiores, y utilizar esa información para ubicar al activo con una precisión inferior a 30 mm, incluso en entornos dinámicos.
Objetivos del sistema RTLS
El algoritmo RTLS tiene como finalidad:
- Posicionar el vehículo en tiempo real dentro del mapa global generado.
- Corregir automáticamente la deriva del SLAM mediante referencias visuales del techo.
- Garantizar relocalización instantánea después de pérdidas de señal, vibraciones o movimientos bruscos.
- Permitir navegación estable en entornos estrechos, pasillos largos o zonas con pocas referencias laterales.
- Reemplazar sistemas UWB o balizas externas, sin infraestructura adicional.
- Mantener un rendimiento robusto bajo cambios de iluminación, polvo o techos irregulares.
Arquitectura general del RTLS
El sistema se basa en una arquitectura híbrida que integra múltiples fuentes de datos:
Cámara nadir RGB
- Captura imágenes del techo en alta resolución (1080p).
- Extrae características: vigas, lámparas, paneles, líneas, patrones repetitivos.
- Genera un mapa visual del techo durante la fase de mapeo.
LiDAR 2D integrado
- Escanea paredes, estanterías, pasillos y contornos del entorno.
- Aporta geometría horizontal estable del entorno.
- Se utiliza para SLAM, mantenimiento de trayectoria y correcciones 2D.
Unidad de medición inercial (IMU)
- Proporciona orientación (yaw) y aceleraciones.
- Mantiene continuidad cuando hay oclusiones temporales.
Fusión SLAM (Sensor Fusion Core)
El algoritmo fusiona:
- Odometry + LiDAR SLAM
- Características visuales cenitales
- IMU
El resultado es un sistema de localización extremadamente robusto.
Funcionamiento del algoritmo RTLS
El proceso se divide en dos fases principales:
Fase de mapeo
Durante el mapeo, el sistema:
- Escanea el entorno con LiDAR para construir el mapa 2D base.
- Captura imágenes del techo en paralelo (camino completo del vehículo).
- Asocia cada zona del techo con su correspondiente posición LiDAR mediante extrínsecos calibrados.
- Genera un modelo visual del techo:
- Bordes
- Puntos singulares
- Texturas
- Repeticiones geométricas
- Comprime y guarda el mapa en el backend.
El mapa final contiene:
- Entorno 2D (LiDAR)
- Mapa visual cenital
- Parámetros de calibración
- Transformaciones entre sensores
Fase de operación
Durante la navegación, el algoritmo ejecuta:
1. Captura continua del techo
La cámara toma imágenes a ≥20 fps.
2. Extracción de características visuales
El sistema detecta patrones “fijos” del techo:
- Luminarias
- Estructuras metálicas
- Tubos
- Paneles
- Uniones de techo
3. Coincidencia con el mapa global (Visual Relocalization)
Cada frame visual se compara con el modelo del techo generado.
El sistema calcula:
- Error de pose
- Transformación XY
- Corrección de orientación (yaw)
4. Fusión con LiDAR + IMU (EKF o Graph-Based Fusion)
El motor de fusión combina las tres fuentes:
- Visual (techo)
- LiDAR (paredes)
- IMU (movimiento)
Las correcciones se aplican decenas de veces por segundo.
5. Salida de Localización
El sistema entrega:
- X, Y (posición global del vehículo)
- Yaw
- Velocidad lineal y angular
- Nivel de confianza de relocalización
Normalmente:
- Verde → Excelente
- Azul → Buena
- Rojo → Débil
Especificaciones RTLS
- Precisión de reubicación: ≤ 3 cm
- Frecuencia de actualización: 20–50 Hz
- Tiempo de relocalización: < 200 ms
- Área soportada: según tamaño del mapa generado
- Entorno válido:
- Techo visible
- Iluminación 0–70 klux
- Movimiento continuo del vehículo
Casos de uso típicos
- Posicionamiento automático de carretillas sin UWB.
- AGVs para pasillos estrechos donde el LiDAR lateral no da suficiente referencia.
- Navegación híbrida exterior-interior, aprovechando patrones del techo (naves, marquesinas).
Ventajas del RTLS basado en visión artificial (CV) + LiDAR
- No requiere infraestructura: 0 balizas, 0 anchors, 0 UWB.
- Precisión muy superior al SLAM LiDAR puro (>3× mejor).
- Resistente a zonas “vacías” con pocas referencias laterales.
- Funciona incluso en zonas de alto tráfico.