

La detección de obstáculos 3D es un sistema avanzado diseñado para mejorar la seguridad, el rendimiento operativo y la autonomía de robots móviles en entornos dinámicos.
A diferencia de soluciones basadas únicamente en sensores 2D (como LiDAR plano), la percepción 3D mediante cámaras RGB-D o sensores ToF permite identificar alturas, volúmenes, profundidades y estructuras reales del entorno, distinguiendo obstáculos permanentes, temporales, estáticos o en movimiento.
El sistema genera un mapa espacial tridimensional en tiempo real, detecta obstáculos y permite al robot planificar rutas seguras sin interrupciones, reduciendo significativamente riesgos, colisiones y tiempos muertos.
Objetivos del sistema de detección de obstáculos 3D
El sistema está diseñado para:
- Detectar objetos y obstáculos en 3D dentro del entorno inmediato del robot.
- Medir la profundidad real y la distancia exacta entre el robot y los elementos del entorno.
- Generar mapas espaciales 3D actualizados en tiempo real durante la navegación.
- Distinguir entre obstáculos estáticos y dinámicos, mejorando la toma de decisiones.
- Clasificar objetos mediante semántica visual, permitiendo respuestas inteligentes.
- Realizar planificación de rutas adaptativa, evitando colisiones y detenciones innecesarias.
- Integrarse fácilmente en robots móviles a través de interfaces estándar (I/O, Ethernet, API).
- Operar con robustez en entornos logísticos, industriales y sanitarios.
Arquitectura general del sistema de detección de obstáculos 3D
El sistema fusiona información visual, profundidad 3D, semántica de objetos y cinemática del robot para generar una percepción espacial completa.
Los componentes principales son:
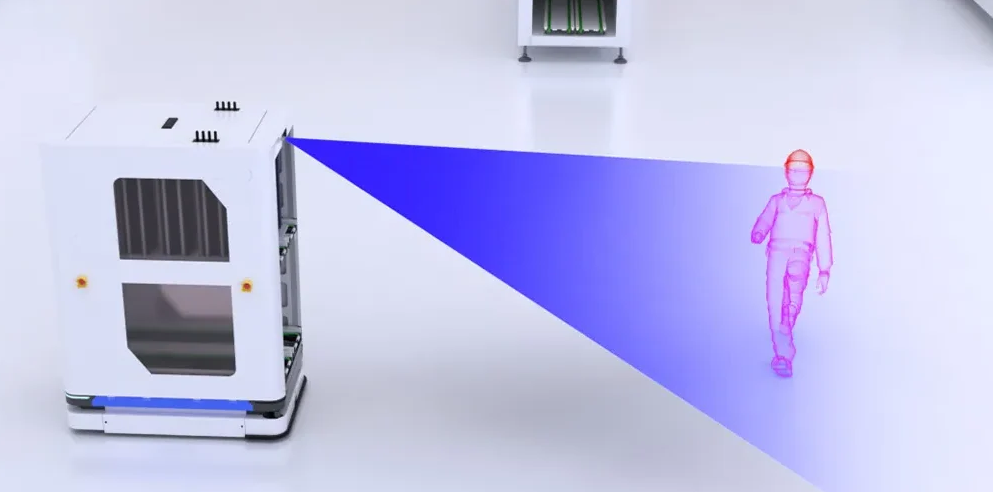
Sensor de profundidad (ToF / RGB-D)
El sensor ToF es el corazón de la percepción 3D:
- Emite luz infrarroja y mide el tiempo de retorno.
- Captura un mapa de profundidad 3D en tiempo real.
- Permite detectar obstáculos a distintas alturas (suelo, medio, techo).
- Funciona incluso en entornos con iluminación variable.
Genera una nube de puntos densa para el algoritmo.
Cámara RGB para semántica visual
Aporta información de color y textura, esencial para:
- Identificación de objetos (personas, carros, pallets, estanterías…).
- Segmentación semántica del entorno.
- Distinción entre obstáculos temporales y permanentes.
- Priorización de rutas según tipo de objeto.
Unidad de medición inercial (IMU)
Aunque no es obligatoria para detectar obstáculos, mejora:
- La estabilidad durante el movimiento del robot.
- La alineación entre frames de profundidad.
- La compensación de vibraciones.
Núcleo de detección de obstáculos
El motor central del algoritmo ejecuta:
1. Generación de nube de puntos 3D
A partir del sensor ToF se obtiene un modelo tridimensional continuo.
2. Segmentación de obstáculos
- Detección de objetos en el volumen 3D
- Separación entre elementos del entorno
- Detección de bordes, huecos, desniveles
3. Reconocimiento semántico
El sistema identifica el tipo de objeto mediante redes neuronales:
- Persona
- Vehículo
- Pallet
- Caja
- Mueble
- Estructura fija
- Obstáculo temporal
Permite tomar decisiones más inteligentes.
4. Clasificación dinámica
Determina si el objeto:
- Está parado
- Se mueve
- Invade la trayectoria del robot
- Debe evitarse, rodearse o ignorarse
5. Planificación adaptativa de trayectoria
El robot ajusta en tiempo real:
- Velocidad
- Dirección
- Curvas
- Paradas seguras
- Desvíos inteligentes
6. Integración con el control del robot
A través de:
- Entradas/salidas (I/O)
- Ethernet o API
El sistema envía señales inmediatas para evitar colisiones.
Especificaciones del sistema de detección de obstáculos 3D
- Tecnología: ToF / RGB-D
- Rango de detección: según óptica (0,5–10 m típico)
- Precisión de profundidad: ±1–5 mm
- Actualización: 20–60 fps
- Campos de visión:
- Horizontal según modelo (60°–120° típico)
- Vertical según montaje
- Capacidad semántica:
- Detección de personas
- Obstáculos dinámicos
- Obstáculos fijos
- Interfaz de integración:
- I/O para señales de parada o evasión
- Ethernet / API para navegación avanzada
- Procesamiento: On-edge (sin PC externo)
- Robustez ambiental:
- Iluminación variable
- Polvo, reflejos, cambios temporales
Casos de uso típicos
- Robots móviles autónomos en almacenes y logística.
- AGVs / AMRs que deben evitar personas y objetos imprevistos.
- Carros autónomos en hospitales, donde abundan obstáculos temporales.
- Robots de picking automático con navegación colaborativa.
- Vehículos autónomos industriales que circulan en pasillos estrechos.
- Drones o plataformas móviles con necesidades de detección volumétrica.
- Sistemas donde se requiere distinguir alturas (por ejemplo, vigas, brazos robóticos, estanterías altas).